Techniques of Indefinite Integration
Integration by substitution. This section opens with integration by substitution, the most widely used integration technique, illustrated by several examples. The idea is simple: Simplify an integral by letting a single symbol (say the letter u) stand for some complicated expression in the integrand. If the differential of u is left over in the integrand, the process will be a success.
Example 1: Determine
Let u = x 2 + 1 (this is the substitution); then du = 2 x dx, and the given integral is transformed into

which transforms back to ⅓( x 2 + 1) 3/2; + c.
Example 2: Integrate
Let u = sin x; then du = cos x dx, and the given integral becomes

Example 3: Evalute

First, rewrite tan x as sin x/cos x; then let u = cos x, du = − sin x dx:

Example 4: Evaluate

Let u = x 2; then du = 2 x dx, and the integral is transformed into

Example 5: Determine
Let u = sec x; then du = sec x dx, and the integral is transformed into

Integration by parts. The product rule for differentiation says d( uv) = u dv + v du. Integrating both sides of this equation gives uv = ∫ u dv + ∫ v du, or equivalently

This is the formula for integration by parts. It is used to evaluate integrals whose integrand is the product of one function ( u) and the differential of another ( dv). Several examples follow.
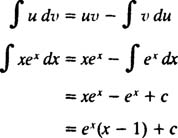
Example 6: Integrate

Compare this problem with Example 4. A simple substitution made that integral trivial; unfortunately, such a simple substitution would be useless here. This is a prime candidate for integration by parts, since the integrand is the product of a function ( x) and the differential ( e x dx) of another, and when the formula for integration by parts is used, the integral that is left is easier to evaluate (or, in general, at least not more difficult to integrate) than the original.
Let u = x and dv = e x dx; then
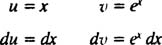
and the formula for integration by parts yields
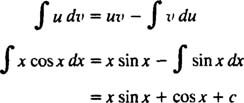
Example 7: Integrate

Let u = x and dv = cos x dx; then
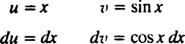
The formula for integration by parts gives
Example 8: Evaluate

Let u = In x and dv = dx; then
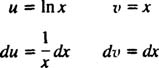
and the formula for integration by parts yields